


设计得很好,原理虽然简单,但很有创意
35026
%7B%22isLastPage%22%3Atrue%2C%22notes%22%3A%5B%5D%2C%22pid%22%3A%22t35026%22%2C%22tid%22%3A%2235026%22%2C%22mainForumsId%22%3A%5B%2237%22%5D%2C%22categoriesId%22%3A%5B%2247%22%5D%2C%22tcId%22%3A%5B%5D%7D
%7B%22isEditMode%22%3Afalse%7D
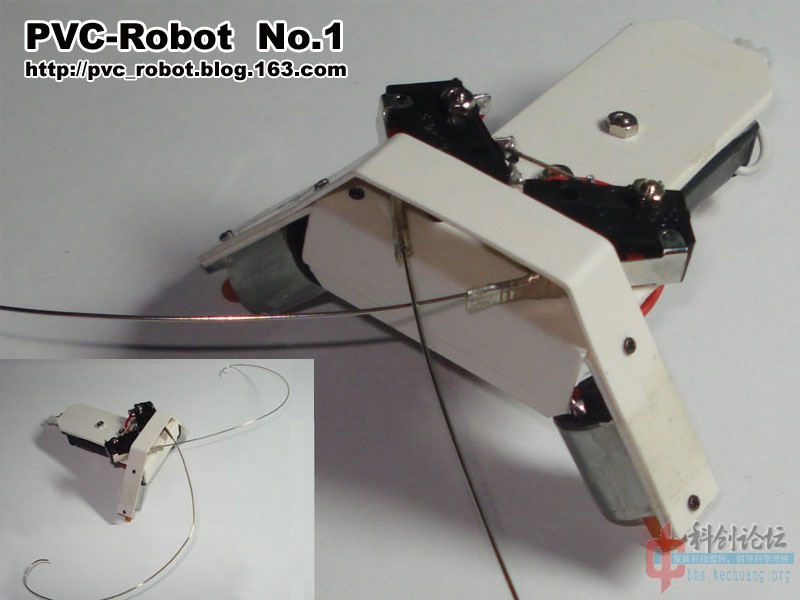
PVC-Robot【1号】疯狂的小强·避障机器人
一般智能的机器人都是用单片机芯片(MCU微处理器)做控制,简单一点的也需要由一些电阻、电容之类的电子元件组成的电子电路做控制。作为PVC系列机器人的第二个项目,这里将介绍一个电路最简单的机器人,其不仅不需要单片机芯片,就连最普通的电阻、电容等电子元件也不用,完全是一个仅由电池、开关、马达组成的最基础的电学电路,一般只要有基本的物理电学基础就可以自行制作了,也正因为如此,在本PVC系列教材没有进到深入内容的时候就对其进行介绍。
![PVC-01.jpg]()
这是一个简单的避障机器人,所谓“避障”即避开障碍物,实际上就是遇到障碍物时会转弯掉头。
以下为效果视频,为了拍摄方便是放在一个小盒子里的,由于地方窄动作也比较快,看起来有点象一只疯狂的小强,如果放在地上则会满屋子跑,追都追不上。
在此,我给本项目的避障机器人再起一个外号——疯狂的小强,呵呵。
点击此处查看视频
一、基本原理
本项目的避障机器人采用三轮传动结构:前面左右两边的两个轮子是主动轮,各接一个电机作为动力;后轮是从动轮,起到平衡的作用。
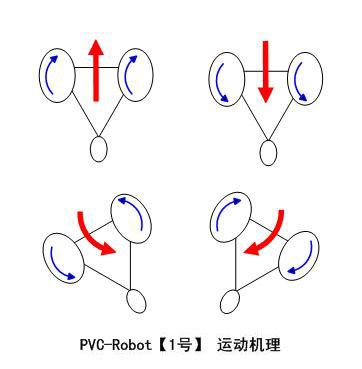
1、运动机理
控制前面两个轮子的转动方向就可以控制整个机器人行进的方向:
1、左右两个前轮都向前转,则机器人向“正前方”直线前进;
2、左右两个前轮都向后转,则机器人向“正后方”直线倒退;
3、左前轮向后转,右前轮向前转,则机器人将以后轮为轴心逆时针转动,即实现向“右后方”转弯倒退;
4、左前轮向前转,右前轮向后转,则机器人将以后轮为轴心顺时针转动,即实现向“左后方”转弯倒退。
![运动机理.jpg]()
特别注意,左右触须与对应控制的电机是交叉过来的,即:左边的触须连接右边的碰撞开关,控制右边的电机;右边的触须连接左边的碰撞开关,控制左边的电机。
![控制原理.jpg]() (1)无障碍物
(1)无障碍物
当前方都没有障碍物,左右两个轮子都向前正转,则机器人向“前方”直线前进。
(2)左前方有障碍物
当左前方有障碍物,在左边触须碰到障碍物时,控制右边的轮子反转,则机器人向“左后方”倒退并转弯,即方向转向了障碍物的右边,从而避开了左边的障碍物。
向后倒退转弯会持续一会,在完成转弯之后,左边触须不再碰到障碍物,则两个轮子都正转,机器人继续向新的没有障碍物的“前方”直线前进。
(3)右前方有障碍物
当右前方有障碍物,在右边触须碰到障碍物时,控制左边的轮子反转,则机器人向“右后方”倒退并转弯,即方向转向了障碍物的左边,从而避开了右边的障碍物。
向后倒退转弯会持续一会,在完成转弯之后,右边触须不再碰到障碍物,则两个轮子都正转,机器人继续向新的没有障碍物的“前方”直线前进。
(4)正前方有障碍物
当正前方有障碍物,左右两边的触须都会碰到障碍物,控制左右两边的轮子都反转,则机器人向“正后方”倒退,从而避开障碍物。
在直线倒退持续了一会后,左右两边的触须都不再碰到障碍物,则两个轮子都正转又变成直线前进;然后又会遇到正前方的障碍物又会直线倒退,再直线前进……如此反复变成一个死循环。
理论上会出现以上这样的问题,但是实际上并不会,因为无论是左右轮的摩擦系数有所差异,还是左右两组电机的驱动功率有所差异,或是左右两组电机的电源的电量有所差异,又或是障碍物左右两部分表面的光滑程度有所差异,都会导致实际上左右两边的触须碰到障碍物有一个时间差,都无法做到两边轮子同时反转,也就是说向后倒退的时候不是完全的直线而是会有所偏移。而且即便第一次是直线后退,但在往复几次碰撞之后肯定会出现偏移,最终解除循环避开障碍物向新的方向前进。
在以上视频中,我们也可以看到这一有趣的一幕,机器人连续几次反复撞上“墙壁”,最后还是会重新转向另外的方向。
从视频中,我们除了看到以上这种特殊情况外,另外还有一种情况,就是有些时候机器人会卡在墙角停顿了好一阵,然后才转向。这是因为有些时候由于触须碰撞墙壁的角度比较偏,不是正面碰撞,导致碰撞的力度不够,触须无法立即触发碰撞开关响应,而机器人在电机的推动下不断的挤向墙壁,缓慢的挤压后才触发了碰撞开关控制转向,也就是看到了机器人在墙角停顿了一会才转向的情景。出现这情况,如果电机的输出功率不足,或是由于电池的电量下降导致动力不足,可能会导致机器人在墙角无力挤压触发碰撞开关,最终变成卡死在墙角,这个时候要么是换大功率的电机,要么就是换新电池。
3、电路原理
本项目的电路非常简单,由一个最基本的电学电路组成。
1、机器人的动力是由两个直流电机提供的,众所周知,直流电机的两个电极连接直流电源,通过改变两个电极所连接电源的正负极,可以改变电机的旋转方向(顺时针或逆时针)。
2、电源为两节7号电池,每节电池作为一个独立的供电单元,每个电机某一时刻只有一节电池为其供电。如果前进时是一节电池供电,后退时则是另外一节电池以相反电流的方式供电。
![电机转向原理.gif]() 3、通过三引脚的碰撞开关,可以控制电机采用哪一单元的电池进行供电,而碰撞开关则连接触须,触须被挤压则碰撞开关被触发。 下图为其中一个电机的控制原理。
3、通过三引脚的碰撞开关,可以控制电机采用哪一单元的电池进行供电,而碰撞开关则连接触须,触须被挤压则碰撞开关被触发。 下图为其中一个电机的控制原理。
![碰撞控制原理.gif]()
4、机器人头部有两根钢丝作的触须,触须分别连接在两个碰撞开关上(注意两根钢丝对应的碰撞开关是交叉的,即:“左—右”钢丝,对应“右—左”碰撞开关)。
(1)没有障碍物时,触须没有被挤压,不触发碰撞开关,碰撞开关默认的通路,给电机供给一个“正方向”的电流,电机于是“顺时针方向”旋转。
(2)有障碍物时,触须被挤压,触发碰撞开关,碰撞开关断开默认通路,连接另外的一组通路,给电机供一个“反方向”的电流,电机于是“逆时针方向”旋转。
这里给出完整的电路原理图:
![电路原理.jpg]()
为了方便大家,这里再给出实物电路接线图供参考。
![电路接线图.jpg]()
![电路焊接示意图.gif]()
这是一个简单的避障机器人,所谓“避障”即避开障碍物,实际上就是遇到障碍物时会转弯掉头。
以下为效果视频,为了拍摄方便是放在一个小盒子里的,由于地方窄动作也比较快,看起来有点象一只疯狂的小强,如果放在地上则会满屋子跑,追都追不上。
在此,我给本项目的避障机器人再起一个外号——疯狂的小强,呵呵。
点击此处查看视频
一、基本原理
本项目的避障机器人采用三轮传动结构:前面左右两边的两个轮子是主动轮,各接一个电机作为动力;后轮是从动轮,起到平衡的作用。
1、运动机理
控制前面两个轮子的转动方向就可以控制整个机器人行进的方向:
1、左右两个前轮都向前转,则机器人向“正前方”直线前进;
2、左右两个前轮都向后转,则机器人向“正后方”直线倒退;
3、左前轮向后转,右前轮向前转,则机器人将以后轮为轴心逆时针转动,即实现向“右后方”转弯倒退;
4、左前轮向前转,右前轮向后转,则机器人将以后轮为轴心顺时针转动,即实现向“左后方”转弯倒退。
2、控制原理
在机器人的头部用钢丝做两根触须,一左一右各连接到一个碰撞开关,分别控制两个前轮的旋转方向。 特别注意,左右触须与对应控制的电机是交叉过来的,即:左边的触须连接右边的碰撞开关,控制右边的电机;右边的触须连接左边的碰撞开关,控制左边的电机。

当前方都没有障碍物,左右两个轮子都向前正转,则机器人向“前方”直线前进。
(2)左前方有障碍物
当左前方有障碍物,在左边触须碰到障碍物时,控制右边的轮子反转,则机器人向“左后方”倒退并转弯,即方向转向了障碍物的右边,从而避开了左边的障碍物。
向后倒退转弯会持续一会,在完成转弯之后,左边触须不再碰到障碍物,则两个轮子都正转,机器人继续向新的没有障碍物的“前方”直线前进。
(3)右前方有障碍物
当右前方有障碍物,在右边触须碰到障碍物时,控制左边的轮子反转,则机器人向“右后方”倒退并转弯,即方向转向了障碍物的左边,从而避开了右边的障碍物。
向后倒退转弯会持续一会,在完成转弯之后,右边触须不再碰到障碍物,则两个轮子都正转,机器人继续向新的没有障碍物的“前方”直线前进。
(4)正前方有障碍物
当正前方有障碍物,左右两边的触须都会碰到障碍物,控制左右两边的轮子都反转,则机器人向“正后方”倒退,从而避开障碍物。
在直线倒退持续了一会后,左右两边的触须都不再碰到障碍物,则两个轮子都正转又变成直线前进;然后又会遇到正前方的障碍物又会直线倒退,再直线前进……如此反复变成一个死循环。
理论上会出现以上这样的问题,但是实际上并不会,因为无论是左右轮的摩擦系数有所差异,还是左右两组电机的驱动功率有所差异,或是左右两组电机的电源的电量有所差异,又或是障碍物左右两部分表面的光滑程度有所差异,都会导致实际上左右两边的触须碰到障碍物有一个时间差,都无法做到两边轮子同时反转,也就是说向后倒退的时候不是完全的直线而是会有所偏移。而且即便第一次是直线后退,但在往复几次碰撞之后肯定会出现偏移,最终解除循环避开障碍物向新的方向前进。
在以上视频中,我们也可以看到这一有趣的一幕,机器人连续几次反复撞上“墙壁”,最后还是会重新转向另外的方向。
从视频中,我们除了看到以上这种特殊情况外,另外还有一种情况,就是有些时候机器人会卡在墙角停顿了好一阵,然后才转向。这是因为有些时候由于触须碰撞墙壁的角度比较偏,不是正面碰撞,导致碰撞的力度不够,触须无法立即触发碰撞开关响应,而机器人在电机的推动下不断的挤向墙壁,缓慢的挤压后才触发了碰撞开关控制转向,也就是看到了机器人在墙角停顿了一会才转向的情景。出现这情况,如果电机的输出功率不足,或是由于电池的电量下降导致动力不足,可能会导致机器人在墙角无力挤压触发碰撞开关,最终变成卡死在墙角,这个时候要么是换大功率的电机,要么就是换新电池。
3、电路原理
本项目的电路非常简单,由一个最基本的电学电路组成。
1、机器人的动力是由两个直流电机提供的,众所周知,直流电机的两个电极连接直流电源,通过改变两个电极所连接电源的正负极,可以改变电机的旋转方向(顺时针或逆时针)。
2、电源为两节7号电池,每节电池作为一个独立的供电单元,每个电机某一时刻只有一节电池为其供电。如果前进时是一节电池供电,后退时则是另外一节电池以相反电流的方式供电。


(1)没有障碍物时,触须没有被挤压,不触发碰撞开关,碰撞开关默认的通路,给电机供给一个“正方向”的电流,电机于是“顺时针方向”旋转。
(2)有障碍物时,触须被挤压,触发碰撞开关,碰撞开关断开默认通路,连接另外的一组通路,给电机供一个“反方向”的电流,电机于是“逆时针方向”旋转。
这里给出完整的电路原理图:

为了方便大家,这里再给出实物电路接线图供参考。


原文图片过多,且受到文件大小的显示,无法一一上传,且为避免广告之嫌也不使用外部链接,如果不妥还请谅解。。。

有没有办法利用扼流圈之类的做一个开关动作延时的结构,使它向后退的距离大一点
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。


pvcbot
 笔友
笔友
200字以内,仅用于支线交流,主线讨论请采用回复功能。