

我发现这样直接充电会有些慢,所以可以再加上个充电电流取样电阻,用同样的方法控制充电电流的大小,另其恒流充电。或者直接设置个电压,在冲到那个电压前全速充电,到达那个电压后开启PID控制器控制电压。
83192
%7B%22isLastPage%22%3Atrue%2C%22notes%22%3A%5B%5D%2C%22pid%22%3A%22850526%22%2C%22tid%22%3A%2283192%22%2C%22mainForumsId%22%3A%5B%22367%22%5D%2C%22categoriesId%22%3A%5B%22%22%5D%2C%22tcId%22%3A%5B6%5D%7D
%7B%22isEditMode%22%3Afalse%7D
STM32控制的闭环zvs升压器(PID控制)
一直以来看了论坛很多的电炮帖子,一直想要做个多级加速的,材料也买了不少,结果总使因为各种原因耽搁下来。在我爸的鼓励下终于准备设计制作一个多级加速的电磁炮,目前的准备是做一个磁阻炮。在今年五月份的时候其实已经做了一个电磁炮,不过是单极的。当时学校组织了个比赛要求做个两轮平衡车,我感觉光做平衡车没啥意思然后又开板整了个遥控器,缠了个单极的磁阻炮加上云台和上弹装置。我叫它“平衡炮台” 。晒一下我的平衡炮台~
。晒一下我的平衡炮台~

因为ZVS简单好焊,所以一直以来都是用的普通的ZVS电路。电路在金坷居士的终于驾驭了ZVS这匹烈马!电磁枪升压电路发布!上改的。
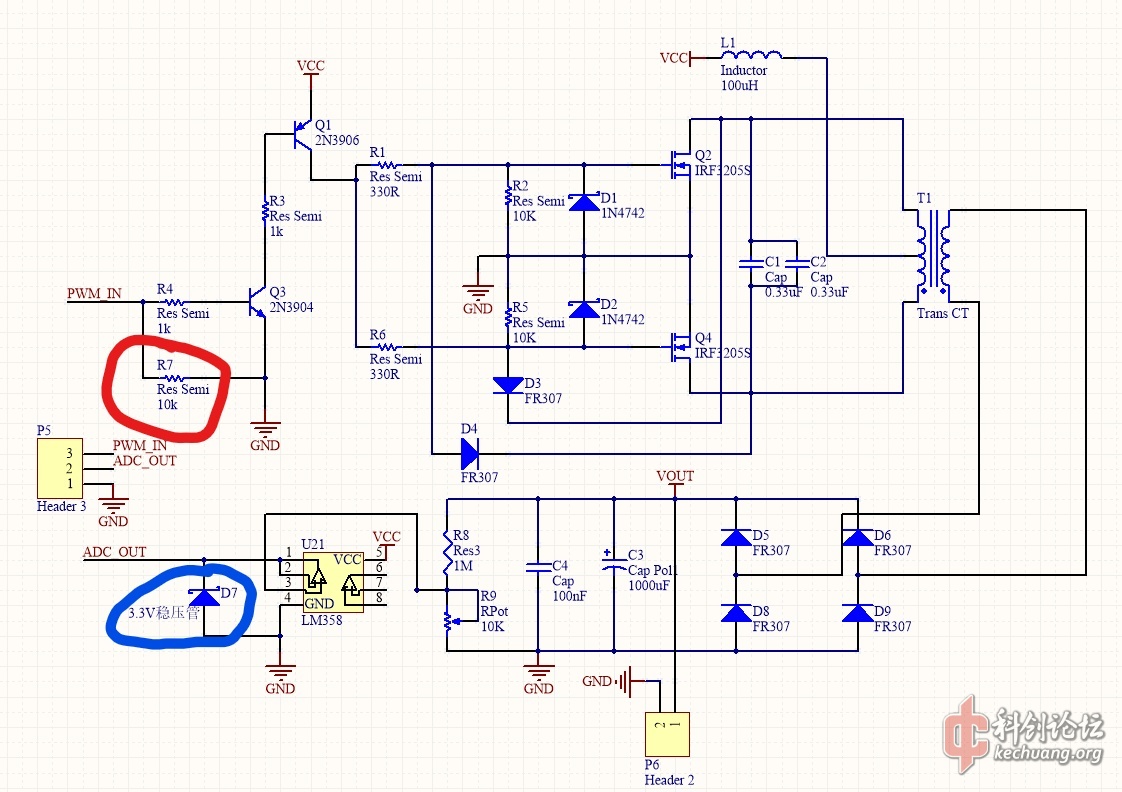
在画红圈处加了个10k的电阻,在之前的“平衡炮台”上没加这个电阻,也没配置于与PWM_IN连接的stm32的引脚,然后两个MOS管莫名奇妙就炸了。。。然后只好加一个接地跳线帽,不用时给PWM_IN接地。但现在加上这个10k电阻就没再炸过。画蓝圈的地方最好加上个3.3v稳压管,不然如果电压过高直接进入STM32的ADC采集引脚会把STM32烧坏的(我就烧了一个)。实物图如下:
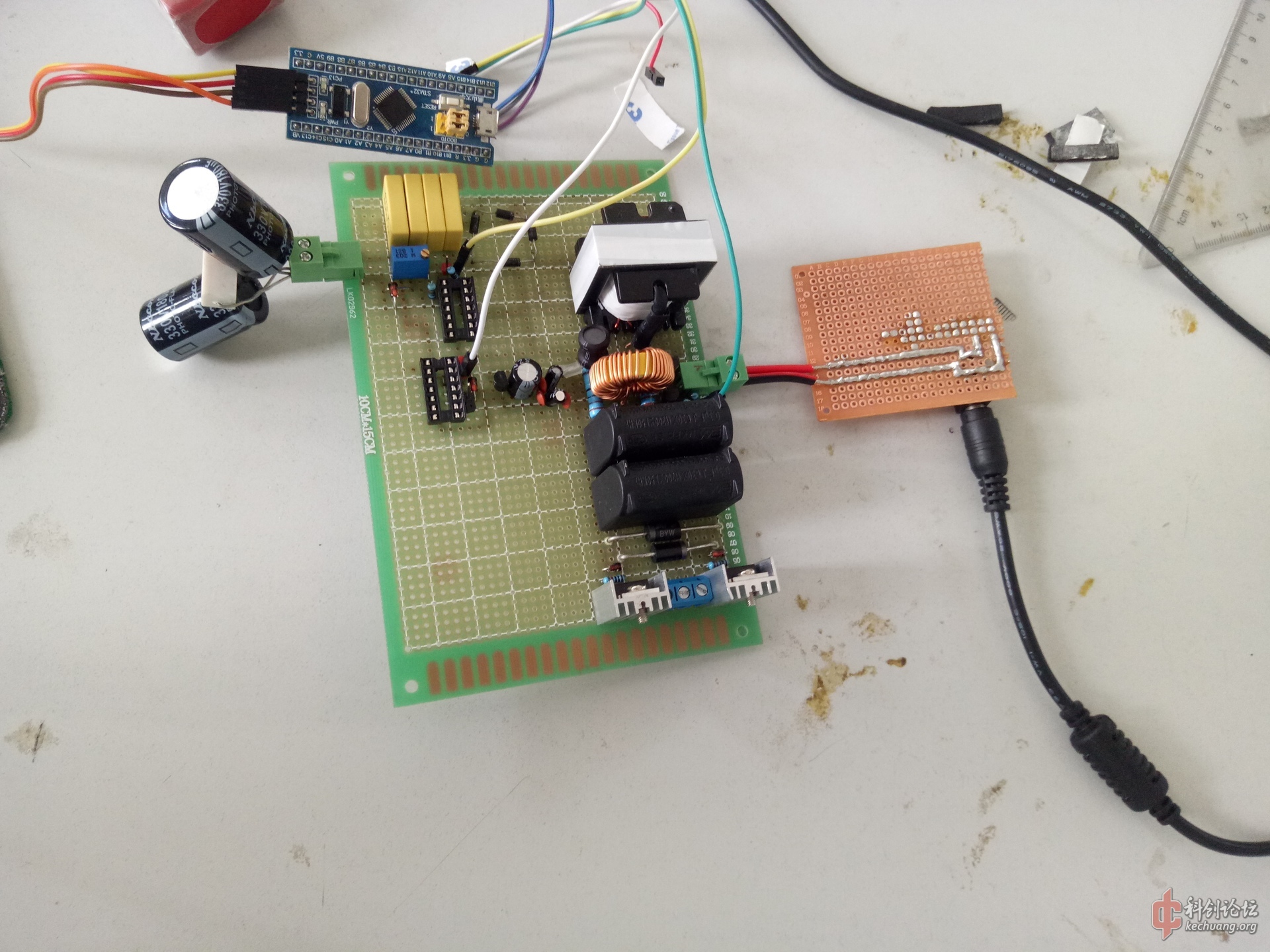
我没接运放直接分压接到STM32的ADC采集引脚了,因为第一次焊的lm324不管用,没有驱动能力,以为是电路的焊接问题,然后又重新焊了一个,结果还是没有驱动能力。。。然后量了下lLM324输入电阻甚至低到了几百欧姆,因为手里只有双电源运放op07了,所以就没有接运放。
因为STM32的ADC输入电阻最大只有350k,而且受采集速度的影响,速度越快,电阻越小,我把速度调到最慢,用万用表测了下大概是16M左右(知道是不是因为万用表坏了的原因,之前测电压超量程了,之后测什么的电压都会比实际高上一些)所以我感觉不太影响就直接接上了(当然接齐纳二极管了,可不想再烧个32)。
代码就是配置了一路ADC和通用定时器TIM3,ADC在触发转换完成中断时更新全局变量ADC_ConvertedValue的值。考虑到不能让ZVS开启时间太短,又测了该ZVS率是40kHz,所以设置TIM3的预分频(PSC)为7199,自动装载寄存器(ARR)为1999。这样产生的PWM频率为72MHz/(PSC*ARR) = 50HZ,占空比可以在0~2000间调节。
<code>int Voltage_Control(int v_now,int v_want)
{
static int e_v_integral;
int Voltage_pwm = 0;
int e_voltage = 0; //电压误差
static int e_voltage_old; //前次电压误差
static int voltage;
voltage = voltage *0.7 + v_now*0.3; //滤波
e_voltage = v_want - voltage; //求出误差
e_v_integral += e_v_integral ; //对误差积分
e_v_integral = LIMIT(e_v_integral,10000,10000); //积分限幅
Voltage_pwm = kp * e_voltage + ki*e_v_integral + kd * (e_voltage - e_voltage_old);
e_voltage_old = e_voltage;
Voltage_pwm = LIMIT(Voltage_pwm,0,2000); //对输出的占空比限幅
return Voltage_pwm;
}</code><code>int main(void)
{
/* led 端口配置 */
LED_GPIO_Config();
/* 定时器初始化 */
GENERAL_TIM_Init();
// 配置串口
USART_Config();
// ADC 初始化
ADCx_Init();
TIM3->CCR1 =0;
while(1)
{
TIM3->CCR1 = Voltage_Control(ADC_ConvertedValue,2048); //调节占空比
printf("\r\n%d",ADC_ConvertedValue);
Delay(0xffff);
}
}</code>写了个简单的PID控制电压函数,在while(1)里循环调用,并把返回值赋值给TIM3通道1的CCR寄存器控制PWM输出的占空比。因为占空比最大是2000,而输入的电压值为0-4096对应0-3.3v(因为32里的ADC是12位的所以是4096)。最大占空比2000除最大误差4096大概是0.48,所以kp大概可以在0.4左右取,调试几个数后发现有过充和低频的电压上下浮动,于是加上kd,然后发现有一直有个静差,果断加上ki,经过几个数的调试后可以达到不错的控制效果,电压在正负2v内变化。

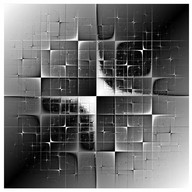
上图是stm32采集到的电压值,看起来还是大概在我设置的2048上的,再仔细调调PID的kp,ki,kd参数估计会有更好的效果。
<strike></strike>
效果很赞,不过既然用上单片机就索性直接输出pwm信号,电压反馈闭环加限流好了,这样应该稳压精度会好很多,也可以用单片机进行UI积分计算搞功率闭环
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
没有ir2110之类的半桥驱动,想用两片tc4424再加上隔离电源驱动全桥。算了算参数后做了个反激变压器,是用stm32产生pwm波经过tc4424驱动mos管,整完后测了测有电压输出,挺开心,然后我就想短路下测测电流有多大,结果一短路不知道哪里坏了,变压器巨烫。。。
然后我就感觉太麻烦了就没有继续整。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
不过现在想想,也不知道为啥前两天那么执着想做全桥,做个简单的推挽也行,就是不知道给电容充电效果怎么样。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。


<code>e_voltage = v_want - voltage; //求出误差 e_v_integral += e_voltage ; //对误差积分</code>
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

没必要三个参数都用上,你那里的尖峰怕不是积分溢出没限制好,可以考虑误差小到一定程度减小一下积分参数
输出隔离了,要是能把采集端隔离就好了
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
 啊对,这里写错了,我再去检查检查。。。
啊对,这里写错了,我再去检查检查。。。当时是一直有静差才加上积分的,结果还写错了。。。我加限制了,那个LIMIT()就是限幅。不过也写错了应该是
<code>e_v_integral = LIMIT(e_v_integral,-10000,10000);</code>
原来是把e_v_integral限制在10000~10000,刚才看了一遍,刚发现,所以其实积分项并没有起到作用。。。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
是考虑过做成隔离的,PWM输出可以用6n137光耦,但是ADC采集端得用线性光耦,我这里只有几个pc817,之前也没有用过,不知道这个电路该怎么设计。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
调节过程中也能实现ZVS么?我之前这样试过,好像如果调节频繁的话会失去ZVS。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
具体还没有用示波器测过,pwm频率不能太大,最小的占空比应比zvs的振荡周期大些,并且两次调节pwm占空比之间的时间也不能设置的太短。我这个在纯zvs不调压的情况下mos管不发热,但是如果开启调压后mos管就会有一定的发热(大概比体温高一些),我感觉我设置的这个还行,可以接受。而且单片机操作方便,可以设置成只在准备好使用时工作,不让其长时间对电容充电,减小发热的损耗。
PS:pwm设置成50hz后能听到哒哒哒的声音,确实也挺烦的。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
期待楼主的波形,或者仿真,我现在也在研究软开关方面,很有兴趣。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

能不能用MCU捕捉环路波形,以此为依据输出PWM,直驱MOSFET实现ZVS,顺便实现调压?
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。