84278
%7B%22isLastPage%22%3Atrue%2C%22notes%22%3A%5B%5D%2C%22pid%22%3A%22861112%22%2C%22tid%22%3A%2284278%22%2C%22mainForumsId%22%3A%5B%226%22%5D%2C%22categoriesId%22%3A%5B%22337%22%5D%2C%22tcId%22%3A%5B%5D%7D
%7B%22isEditMode%22%3Afalse%7D
什么样的微处理器才能满足电机矢量控制?
EV技研

矢量控制的硬件
实际应用编码器位置传感器的RX62T 系统中,微处理器资源分配如图1所示。
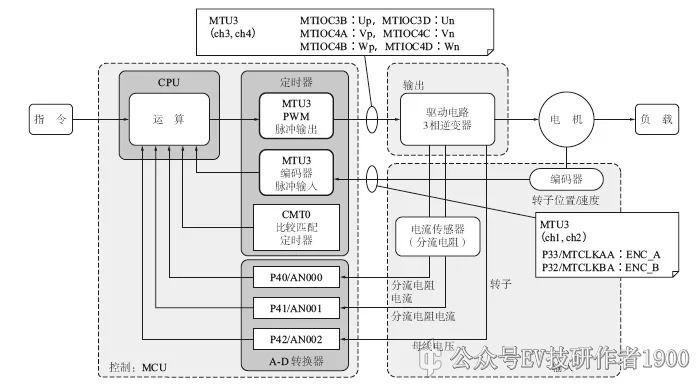
3 相PWM 输出(通道3、通道4)与编码器输入(通道1、通道2)、PI 控制周期内 CMT(比较匹配定时器)通道0、A-D 转换器的母线电压与电流传感器输入由MTU3(多功能定时器单元)控制。
死区时间功能
如前所示, 由开关器件构成的上下臂( 互补PWM)同时开通会形成短路。理论上不该存在这样的贯通电流(U 相→ U 相),哪怕在开关(切换时)瞬间发生这种情况也会形成短路。电机多数工作于高电压、大电流的工况,这种短路会瞬间烧坏或损坏电机。
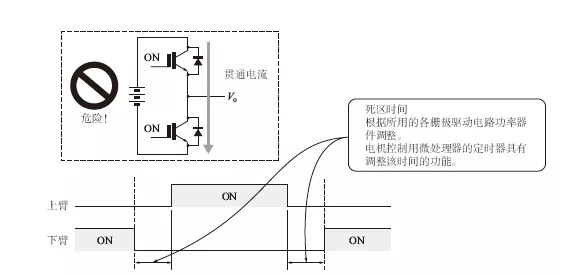
图2
图2所示的RX62T 的定时器(部分)具有死区时间功能,能够自动设定死区时间,也可根据逆变器的特性设定死区时间。带有死区时间的6 相输出( 互补P W M ) 由MTU3 的通道3 和通道4 控制。通道1 和通道2 的相位计算模式,可用于测量数字旋转编码器信号。不过,Z 相输入信号由IRQ 端子接收,在程序中进行计数器清零处理。
过电流保护:POE 功能
MTU3 的POE(Port Output Enable,端口输出使能)功能(参见表1),

可用于逆变器的过电流保护。当分流电阻电流检测电路的采样信号电平过高时,该功能发生作用。比如,出现过电流和母线电压异常时,强制关闭PWM 输出,让电机安全地停止(图3)。

图3
虽然是为了安全才让电机停止,但电机突然停止也是很危险的。为了防止过度反应导致误动作,可以通过POE 设置信号一致检测次数;也可以检测中断请求,经处理后停止PWM 输出。
A-D 转换开始触发功能
对于电机控制来说,A-D 转换开始触发器和3个S/H(采样和保持)电路与MTU3 连接十分便利。进行180°通电时,A-D 转换时间在PWM 通断动作时无法准确地捕捉,需要在电流稳定时进行观察。这就要求PWM 的动作必须要配合MTU3 的动作才能启动,而且要自动进行。另外,如图4 所示,3 个S/H 电 路是有效的,因为一般不使用3 个分流器同时测量相电流,通常先测量出其中两个相的电流,然后对剩下的一个相的电流进行估算。

图4
1
END
1
往期精彩
