

这粘成一团怎么看啊。。。
53355
%7B%22isLastPage%22%3Atrue%2C%22notes%22%3A%5B%5D%2C%22pid%22%3A%22t53355%22%2C%22tid%22%3A%2253355%22%2C%22mainForumsId%22%3A%5B%22134%22%5D%2C%22categoriesId%22%3A%5B%220%22%5D%2C%22tcId%22%3A%5B%5D%7D
%7B%22isEditMode%22%3Afalse%7D
回 1楼(primula) 的帖子
代码我重新整理了,现在应该可以了
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
没仔细看,但下面这种代码:
#define ACC_Gain 0.000061
但凭经验,在嵌入式系统中最好少用浮点计算:
一方面精度不好保证。
另一方面运算量太大导致反应不及时。
这两个问题都会导致系统实时性以及精确度大打折扣。
顺便提一句:几乎所有ARM平台的Linux Kernel中都不支持浮点数运算的。。。
#define ACC_Gain 0.000061
但凭经验,在嵌入式系统中最好少用浮点计算:
一方面精度不好保证。
另一方面运算量太大导致反应不及时。
这两个问题都会导致系统实时性以及精确度大打折扣。
顺便提一句:几乎所有ARM平台的Linux Kernel中都不支持浮点数运算的。。。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 3楼(daxus) 的帖子
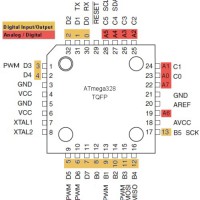
忘了说了,小弟用的是Arduino。上面的陀螺仪滤波都是复制的,(呵呵,数学太差)用串口程序看了看陀螺仪输出的图形,感觉数据曲线还是蛮平滑的,也就直接用了。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

回 4楼(zqdl8) 的帖子
玩51的菜鸟撸过。。。
完全看不懂东西。。。
完全看不懂东西。。。
引用
加载评论中,请稍候...

200字以内,仅用于支线交流,主线讨论请采用回复功能。