加载中
加载中
表情图片
评为精选
鼓励
加载中...
文件下载
加载中...
放寒假闲着在家没事做,一拍脑袋说好久没捣腾过电子玩意了不如搞块航电来玩玩吧。而且最近刚好学了DMAIC不如来实践一下。
简略的介绍一下, 这块其实是根据我上一块航电改进的。经过上一次的教训我发现自己技术不行拿个破风枪根本焊不上QFN之类的小package,心一横马的干脆直接用现成的模块
Define:要实现火箭姿态,高度,加速度,gps坐标,sd卡数据记录,发射/降落伞双火工通道,远程监控火箭状态
Measure:火箭直径不小于60mm(确定了pcb大小),加速度不超过16g(问了一个玩火箭的美国老头)
Analyze:IMU数据通过现成的代码解出火箭的四元数,所有数据先暂时储存在Flash里面,发射后启动一个计时器,足够长的时间以后把数据写入sd卡里面。
Improve:正在做,可能未来降低一些成本吧
Control:还没做
这块板子设计的宗旨: 能用现成的模块就不用单独的芯片,能抄现成的代码就不要自己写。(其实是懒)
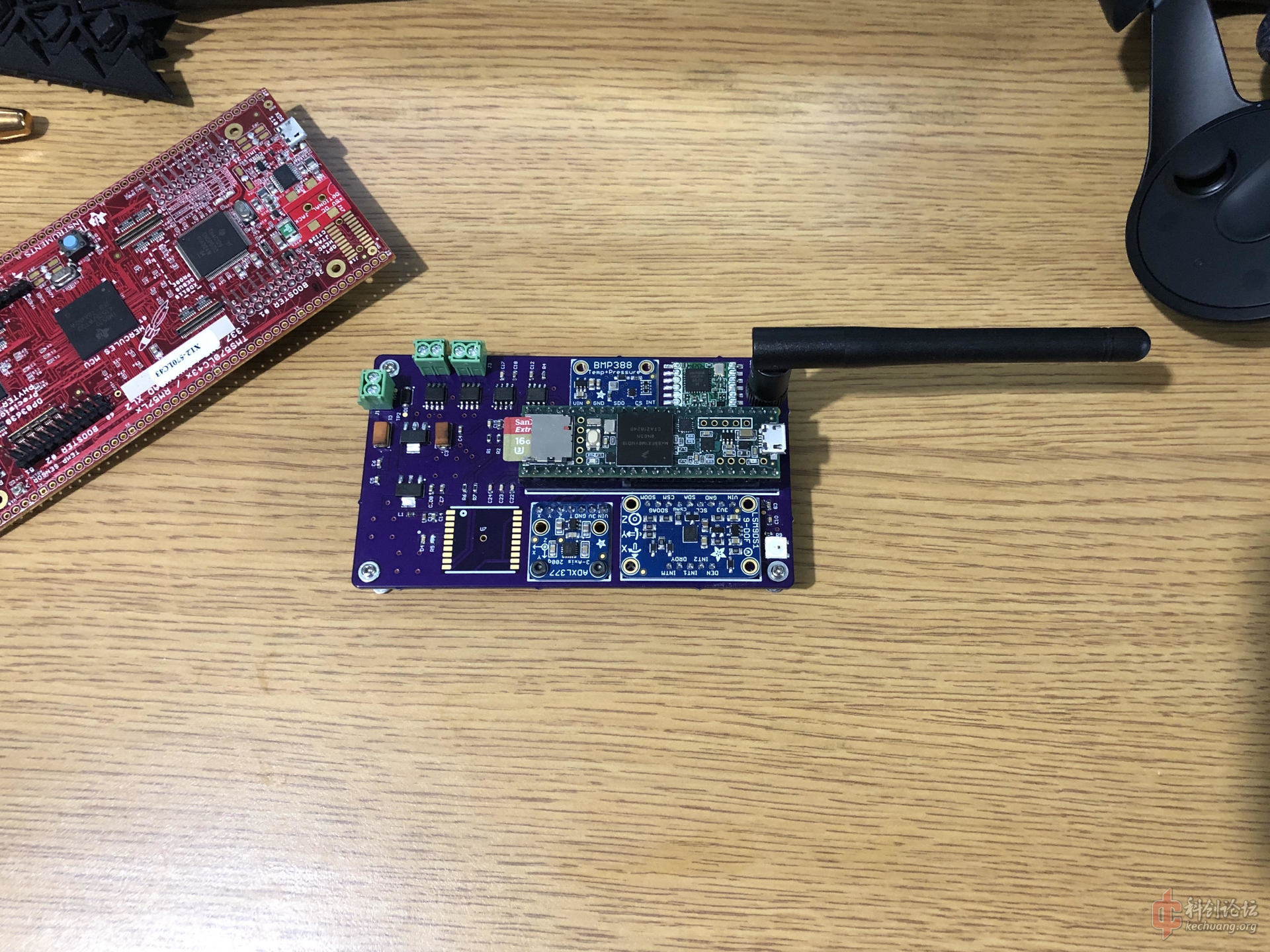
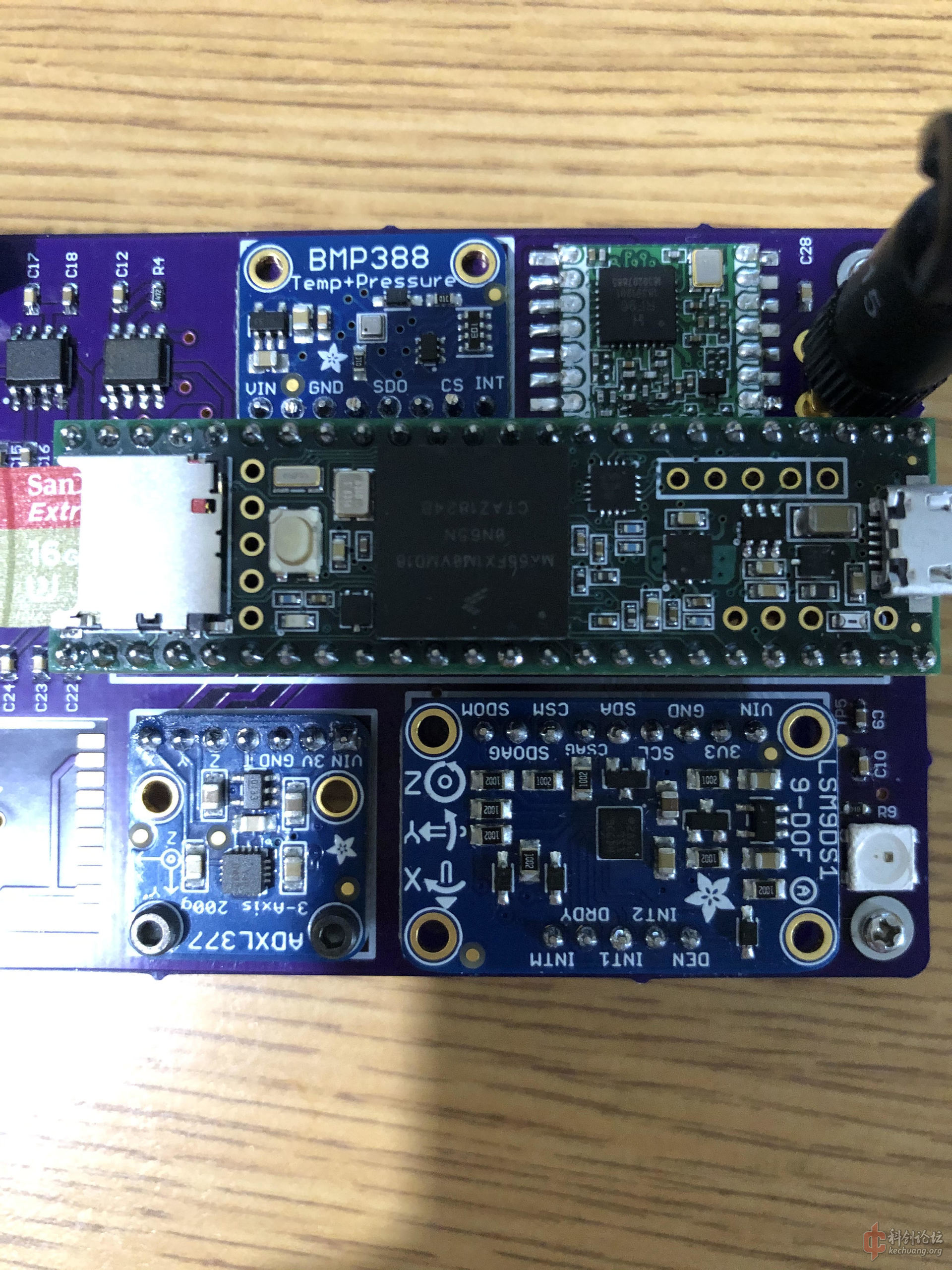

MCU是MK66FX1M0,LSM是IMU,BMP388是高度计,LoRa用的是RFM95模块,GPS快递还没到。 上图四个SOIC-8从左到右分别是MB85RS64V,ADR4533,IRL6342TRPBF,IRL6342TRPBF。
原理图仅供参考

板子画得很烂就不发了
代码也不发了都是从adafruit官网抄的
成本: 330$
板子99刀/3块
零件:总计231刀
欢迎各位提出改进意见