
这种模式的思路和早期单极性spwm调制的时序图思路类似,前者是均摊上下桥臂的频率压力,这种方法解决了单极性调制下上下桥臂热量不均的问题。楼主的思路是均摊高电流回路从而均摊热量。很好的思路,这样解决了均流。有个事情想问楼主,在高电流情形下igbt的导通压降与体二极管的导通压降相比如何?传统工作模式的时序又是如何用逻辑电路实现的呢?
加载中
加载中
表情图片
评为精选
鼓励
加载中...
文件下载
加载中...
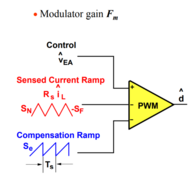
长期以来,我们的特斯拉线圈可以看作,一个带使能信号后延关断,跟随主功率波形过零点的谐振开关电源。
一般的工作波形用经典的图来看如下,红色波形部分为ENBALE段,而绿色波形部分为DISABLE段。
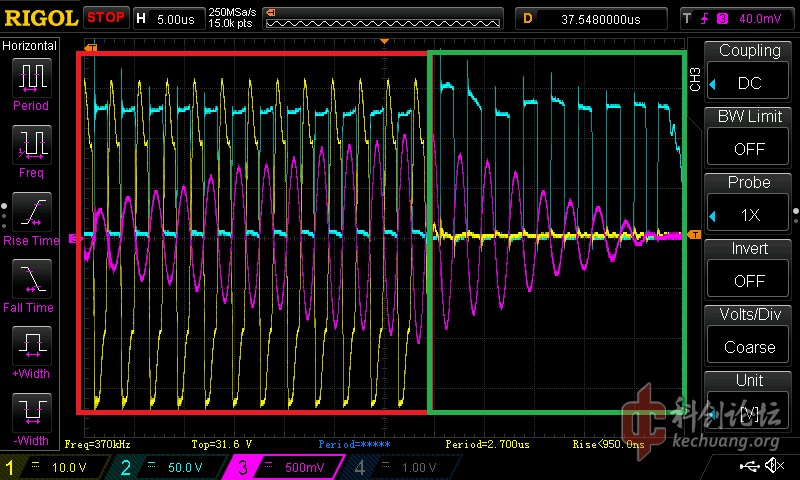
长期以来,这成为几乎SSTC DRSSTC QCWDRSSTC等各种特斯拉线圈工作准循的标准工作模式。
从能量传递的角度来分析,红色部分是全桥传递给线圈LC组的过程,而绿色是线圈组储能LC组通过全桥二极管向电容续流的过程。
电弧长度与槽路能量持续时间和持续强度是正相关的,而下降部分仅能维持电弧的存在,而无法对电弧增长提供贡献。
-
而如果有一种工作模式,可以在绿色部分,让电流继续在槽路中持续流动,这样可以避免反馈回母线电容以及损耗在线路中变成热损耗掉。
也可以减少体二极管以及槽路钳电容的电流应力,最重要的是,能够使绿色部分的时间大大加长,这样对电弧长度的贡献是有利的。
-
考虑到全桥是由四个管子组成的,所以一次续流过程,必然由一对IGBT和体二极管组成。
这样就能把续流过程分为2个周期,如下图所示。

或者用2、4这样的过程,利用两对桥臂的下管,来完成同样的工作,但是电流流过会导致热效应,这样的工作过程,会导致上、下管过热。
对于大电流工况下的DRSSTC,会累积热不平衡,导致过热,
这里提出一个新的工作模式,在灭弧周期结束之后,是由1、2、3、4顺序导通IGBT,让电流在上下管对中持续流动。
这样就能在四个管中均摊电流热效应带来的影响。
-
以上两点从工作原理到具体实施方案上提出了一个全新的工作模式,
这种模式很难想象在其他工业领域有应用,能找到的资料也甚少,所以还需要爱好者们来完善它的实现方式以及可能踩到的雷。
为了方便讨论,我们暂时把这种专用于特斯拉线圈的模式称为主动续流模式。
在这抛砖引玉,对于这种工作模式有什么利弊?能带来多少电弧收益?用什么样的逻辑电路在现有驱动板基础上改进?
我会着手用硬件逻辑描述语言来实现以上工作,欢迎讨论!
[修改于 6年8个月前 - 2019/01/07 11:13:25]
这种模式的思路和早期单极性spwm调制的时序图思路类似,前者是均摊上下桥臂的频率压力,这种方法解决了单极性调制下上下桥臂热量不均的问题。楼主的思路是均摊高电流回路从而均摊热量。很好的思路,这样解决了均流。有个事情想问楼主,在高电流情形下igbt的导通压降与体二极管的导通压降相比如何?传统工作模式的时序又是如何用逻辑电路实现的呢?
具体的导通损耗区别没有计算过,你可以算一下,软开关切换开关损耗不是主要损耗因素。
可以从IGBT压降和二极管压降很容易计算出来区别。
另外这个模式其实对损耗不敏感,主要是让初级线圈的灭弧发生后,电流继续在LC回路中持续更长时间。
避免在红色段泵入的能量在绿色段又通过反向续流的方式回到母线电容,这减少了单位时间的能量利用率。
-
最近一段时间另一个思考是关于云豹的SKP工作模式,总所周知DRSSTC的SKP模式,是属于脉冲密度调功。
但是避开一个脉冲和避开一个周期,在回路上表现出的状态确是完全不同的。
现在的云豹SKP驱动,是通过在过流区间,制造一个跟随电流波形过零点的N*Period失能区来实现功率控制。
而这样全桥完全关断之后,初级线圈的电流会在失能区间,快速的续流到母线电容。
这样会造成电流波形的不规整,使包络显得像锯齿一样,这样会影响电弧的生长,产生更多交叉。
-
而如果在SKP工作模式中,创造一个N*Period/2的失能区,则在过电流时LC电路的能量可以在全桥内继续流通。
而不会损失到母线,这样的结果对于电流的稳定是有很大积极意义的。
可以让基于SKP调功的QCW电弧更直,这也是国内外爱好者普遍讨论的一个话题,毕竟SKP是完全软开关,而PS不是。
这种模式的思路和早期单极性spwm调制的时序图思路类似,前者是均摊上下桥臂的频率压力,这种方法解决了...
另外之前的驱动逻辑,主要是用全数字电路实现的,云豹驱动板的RC外挂器件其实是冗余设计,这是之前出于防伪的考虑,
现在看,市面上很多号称PDM调功的驱动板,如果可以去掉这部分器件,但是依然照搬设计上板,这说明固件和云豹是一样的。
如果不能去掉,说明其本质依然是DR4经典电路,仅仅是搬运到硬件描述逻辑语言中实现。
这一点不是什么高精尖技术,但是可以注意辨别。
-
这个新主动续流的逻辑实现,我最近比较忙,没有想出一套具体的实施方案。
但是从原理上来分析的话,必须要在灭弧信号发生之后,
依然保留两个GDT中其中一个处于正逻辑,过零点之后,另一个GDT处于正逻辑。
而后,交替负逻辑,这样可以分摊桥臂四个管导通产生的热量,在FB信号稳定的情况下,可以用组合逻辑简单实现。
直觉上用几个D触发器配合与或门就可以实现这个,对硬件描述语言应该更简单,三行之内。
不知此处将二极管并联高压mos,续流采用mosfet同步整流实现是否靠谱,直觉上效率会有些微的提升。。
另外就是。。。我对将云豹驱动板设计成ASIC很有兴趣 ,不知这种PDM调功的桥驱动IC市场如何(本人对功率这块不熟,微电子刚入门)
,不知这种PDM调功的桥驱动IC市场如何(本人对功率这块不熟,微电子刚入门)
另外就是。。。我对将云豹驱动板设计成ASIC很有兴趣😂,不知这种PDM调功的桥驱动IC市场如何(本...
我觉得肯定会有效率上的提升,但是肯定会多出一套专用的隔离驱动电路,10KW级之内可能暂时不会考虑。
如果用纯数字逻辑实现,云豹现在我可以优化到耗费50-70LEs资源,如果用类似pwm芯片那样RC外置的设计,可以只用10LEs之内的资源实现。
设计成ASIC可能小材大用了,一般PDM调功在电流型超大功率谐振应用中会有,但这个设计需要考虑到GDT的磁不平衡等因素,需要考虑实际情况。
市场可能不会很大,因为现有的会有CD4046/KA7500等配合外围电路搭建而成。
但是数字逻辑实现的优势也是显而易见的,灵活性扩展性上都很好,保护或调功模式,可以更加智能且聪明。
比如通过一些操作合理规避例如GDT不能超过50%占空比的限制,滞后桥臂交替开关切换热管理等等。
😂我觉得肯定会有效率上的提升,但是肯定会多出一套专用的隔离驱动电路,10KW级之内可能暂时不会考虑...
我觉得还有一个应用场景:挑战使用超紧凑封装和最小的管子实现高效率的SKP DRSSTC/滑稽
另外就是,小功率领域,GDT占空不超过50%这个问题可以通过电荷泵+LDMOS做电平转换去直接驱动上半桥臂解决(例如著名的IR2110),想请教一下这样的技术思路在大功率场景下会遇到什么样的困难?
@rpg-7 2110上臂占空比可以大于百分之五十,但是仍然不能太大,否则自举电容会出现欠压问题,我见到很多上臂驱动是隔离的,最早的是光电耦合器隔离,英飞凌有磁隔离方案,ti的是电容隔离。
我觉得还有一个应用场景:挑战使用超紧凑封装和最小的管子实现高效率的SKP DRSSTC/滑稽
是的,和商业化应用不一样的是,爱好者很大一部分乐趣是来自于怎么极限输出手中的功率元件性能
发挥出最强性能意味着能解决许多限制性能的因素,通关解锁一样有趣。
当然反过来看,了解到系统极限在哪,也能知道它能稳定工作在什么样的区间,相辅相成。
@rpg-7 2110上臂占空比可以大于百分之五十,但是仍然不能太大,否则自举电容会出现欠压问题,我...
非常正确,自举是需要Toff供电的。
GDT在这里面不超过50%的原因是没法磁复位,加外部磁复位也可以。
我说的有点问题哈,记错了,IR2110本身没有电荷泵,但是我看到的一片文献中使用了外挂电荷泵来规避TON不能太大这个问题,非常有趣
https://wenku.baidu.com/view/5dc2e876f46527d3240ce037.html
另外就是最近搜集到的一些Buck变换器芯片实现的论文中,自举电容也是采用电荷泵提供上管驱动,就不知道这么搞能不能在大功率场合用了(笑
还有就是刚刚想到一点可能的原因就是目前为止国内BCD工艺提供的DMOS耐压性能多少有些不够,貌似最高也就BPS的700v 了吧。。。可能真全做在一片上可能分分钟炸飞。。。
另外还有一个问题就是TC这玩意的效率是怎么量化的呢?
@rb-sama 我说的有点问题哈,记错了,IR2110本身没有电荷泵,但是我看到的一片文献中使用了...
其实我觉得可以,因为稳态的情况下没有问题的。自举驱动也广泛应用了。
但是自举有一个问题,就是瞬态响应不好,比如在频率或者占空比大幅度变化的情况,上管很容易非正常充电进入线性区。
这是自举结构的通病,驱动力也很一般,所以很多芯片厂家都没有解决。(比如DRSSTC启动/关闭、开关电源瞬态响应)
-
比较经济的方法,还是用一路正负输出的隔离电源,然后配合驱动光耦可以实现,我上个QCW就是这么做的。
其实有一种方法就是高频调制GDT,这个类似磁隔离芯片,用高频方波输入栅极,栅极能把调制波解调成正确的驱动波形。
我们用两个磁环驱动一个管子,可以实现大于50%占空比的隔离驱动。
这个适合用于比如QCW里面的BUCK管的隔离驱动调制,我打算在下一个版本中把它集成在驱动板上,这样可以减少一路隔离电源。
@rb-sama 我说的有点问题哈,记错了,IR2110本身没有电荷泵,但是我看到的一片文献中使用了...
刚看到你最后一个问题。
其实我觉得TC的效率可以从两个方面来看。
一个是传统意义上的能量传输效率,就是作为一个电源,从输入到负载中的传递效率有多少。
因为DRSSTC作为一个双谐振耦合系统,在初级回路中实现完全软开关切换,可以做到输出的都是有功功率,效率是可以接近于1的。
大部分功耗会损耗在桥的开关、初级线圈的电阻、次级线圈的电阻中。
-
另一个则是效费比,这其实是很多爱好者做TC关注的。
但是由于双谐振耦合电路的特点,能量是在初级和次级线圈中来回传输,如果认为DRSSTC是为以好的输出电弧为目的。
那么就要从如何设计系统,让它有效的输出电弧为效率衡量指标。
比如考虑两个极限情况,耦合度为0,能量全部在初级LC里循环,耦合度为1,能量全部被耦合到次级LC中。
前者能够保证足够大的上升率,却无法把能量泵送到次级线圈,后者能保证足够的能量泵送,却无法形成足够的上升率。
因为DRSSTC是可以通过调谐调节的方法,可以形成脉冲输出的效果。
松耦合系统对DRSSTC输出电弧电压的增长,是有正促进作用的。但是过低的耦合,会让初级线圈电流过早的升至OCD保护限值。
-
这里面就受到次级线圈绝缘、全桥电流限值等影响,如何匹配组合这些参数,让给定的功率电路发挥出最大电弧效果,
可能同样一个桥,同样的输入电压,输出电弧的大小,不同的参数发挥出来的效果不一样,
不同的布局、线径、材料、驱动方式、能量回收方式、等等都是影响输出电弧效率的,所以就是TC设计者需要考虑的效率(效费比)。
一个跑400A的DR初级截面要多少平方
实在缺钱,能省的地方尽量省-.-




200字以内,仅用于支线交流,主线讨论请采用回复功能。