


看着某湖有点眼熟啊,
84550
%7B%22isLastPage%22%3Atrue%2C%22notes%22%3A%5B%5D%2C%22pid%22%3A%22863075%22%2C%22tid%22%3A%2284550%22%2C%22mainForumsId%22%3A%5B%22163%22%5D%2C%22categoriesId%22%3A%5B%22439%22%5D%2C%22tcId%22%3A%5B%5D%7D
%7B%22isEditMode%22%3Afalse%7D
DIY无人机载C波段(5.8G)合成孔径雷达遥感成像平台

有关合成孔径雷达的原理:
https://www.kechuang.org/t/83141
雷达系统硬件实现:
https://www.kechuang.org/t/83594
如图,雷达系统为上贴中的雷达以及一台PC,使用一架650四旋翼无人机搭载。由于前一个帖子中的FMCW雷达系统经实际测试输出功率未达到设计值,又额外增加一级功率放大器将输出功率提高到约27dBm(由于暂时缺少能用到6GHz的功率计和频谱仪,此值为理论值)。
场景A:某湖及周边建筑:
可见光光学图像(谷歌卫星地图):

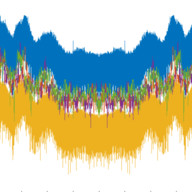
SAR图像:
场景A,高度50m

由于图一中的悬吊安装方式会导致飞行过程中雷达系统的天线方向在风力作用下前后摆动,从而使得成像质量劣化,而且降落时操作难度也比较大,于是改成直接固定安装在机架下方。
改变安装方式后的成像结果:
场景A,高度100m


场景B:
光学图像:

SAR图像,高度100m:

由于天线角度和发射功率关系,太近和太远的目标都比较暗,不容易看清。
所有SAR图像均已矫正至地距,每像素为0.2m,图像宽度为349m,雷达位于图像左端由下往上运动。
===================================================================
有关成像代码已更新至XXXXXXXXXXXXXXXXXX/gym487/SAR_exp
有关成像算法的一点备注:

由于这个雷达硬件使用的是如图的模拟去斜方式解调,而扫频率k为正,则接收信号的频率总是要比本振的频率低。由于ADC采样后送入FFT的是单路实信号,所以经过FFT解调出来的频率实质上其实是
$$ f=|-\frac{2kr}{c}|$$
对于SAR,由于我们需要利用雷达与目标的相对运动产生的多普勒效应进行成像,考虑到回波产生的多普勒频偏$f_{dop} $
则包含多普勒偏移的点目标信号解调后频率为$$f_{total}=|-\frac{2kr}{c}+f_{dop}|$$由于扫频产生的频率f远大于多普勒频率,所以实际上
$$f_{total}=\frac{2kr}{c}-f_{dop} $$
可以看到多普勒频率的符号被反转了,因此推导此雷达的成像算法时,方位向匹配滤波器的相位要额外加多一个负号。
[修改于 4年8个月前 - 2019/08/31 01:17:37]
可以尝试用固定翼飞机获取数据,应该比多旋翼稳定得多。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

可以尝试用固定翼飞机获取数据,应该比多旋翼稳定得多。
固定翼的话起降要个跑道,虽然也有那种手掷起飞伞降或者类似鱼鹰那种螺旋桨可以倾转垂直起降的航测飞机可以买,但是比起四旋翼还是比较贵的。
其次固定翼飞行速度比较快,高速扫描对雷达的PRF或是天线的方向图要求比较高,要另外再改动了。
其实多旋翼还是挺稳的,自动飞行走直线时看飞控上的数据,速度误差平均不到4%。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
话说国外的那个袖珍合成孔径雷达能做到什么样的清晰度
是说ImSAR公司那个NanoSAR么
网上找的图,大概这个效果
成像距离也宽很多,当然入射角要求不太大的话也就要求较高的飞行高度。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。



请问成本大概多少钱? 从信号质量看,硬件应该还不错,不过成像处理改进一下,图像质量还可以得到很大提高。这是我们做的微型旋翼无人机SAR成像效果。

引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
请问成本大概多少钱? 从信号质量看,硬件应该还不错,不过成像处理改进一下,图像质量还可以得到很大提高...
只算雷达硬件在2k多点。
这个图的成像距离和质量厉害,工作性能参数方便透露吗?
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
厉害,这个都是你自己做的?我们的是一帮人做的,有专门做雷达硬件的、做成像处理的。对于这种微型多旋翼雷...
是,这个是自己做着玩的,没有兴师动众
确实,现在是把原始数据直接用RD算法成像,如果加上自聚焦之类的补偿措施应该会好看一些。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
您好!请问你这个还在继续做吗?如果可以的话,能否请您帮忙做一套卖给我们啊?
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

这个厉害!应用领域广!可以的话,大家可以一起合作搞一下!特别是软件开发和图像处理部分!
引用
加载评论中,请稍候...

200字以内,仅用于支线交流,主线讨论请采用回复功能。