






赶上直播了...
坐等看"无质量刚性延长杆" ....
PS:
老虎辛苦了。。。
这滑轮车的。。。。太象滑轮了。。。[s:230]
坐等看"无质量刚性延长杆" ....
PS:
老虎辛苦了。。。
这滑轮车的。。。。太象滑轮了。。。[s:230]
引用第56楼虎哥于2012-02-01 04:52发表的 :
不用这么悲观吧~~~科学实验可以尽量接近理想状态,可以将不理想的因素通过各种办法消去,本题也一样。上面的实验犯之所以不能得到结论,只是因为角度和位移之间的对应关系没有搞清楚。
引用第56楼虎哥于2012-02-01 04:52发表的 :
不用这么悲观吧~~~科学实验可以尽量接近理想状态,可以将不理想的因素通过各种办法消去,本题也一样。上面的实验犯之所以不能得到结论,只是因为角度和位移之间的对应关系没有搞清楚。
虎哥 发表于 2012-4-23 18:49
看起来大家已经有结论了,那就是不论理论还是实践,都证明三种情况形变量是不同的。
紧接着就提出了新的问 ...
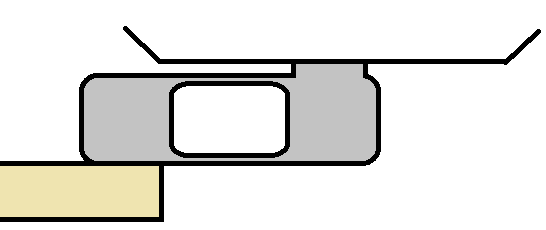
量子隧道 发表于 2013-10-25 23:40
刚才拆了家里的电子称专门看了下,发觉它的弹性装置不是悬臂梁结构,是下面图中灰色的结构,中间有个大窟窿 ...
虎哥 发表于 2013-10-26 00:03
这个传感器真的怪异,不论物体放在盘子上的什么位置,结果相同。
就是梅特勒的磁平衡天平,大体上仍然满 ...
metellan 发表于 2013-10-26 08:55
第二个问题中,弹性片是S型形变。这个肯定不是中学能解决的问题,只能用有限元去模拟。
dianzibiaoge 发表于 2013-11-18 22:29
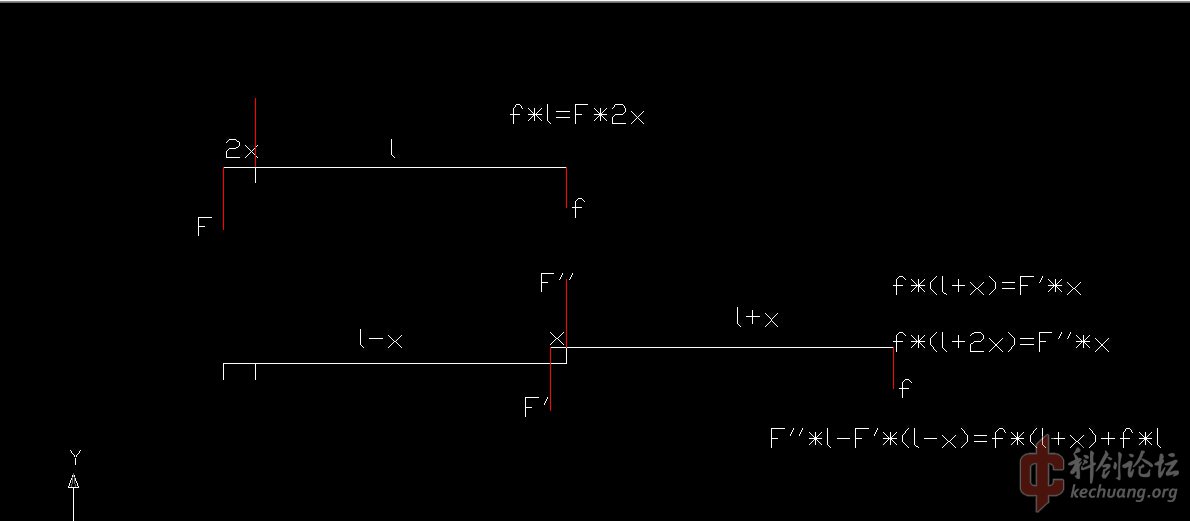
我回答的太唐突了,没仔细想。我重新分析一下,我是按照杠杆原理进行分析的,
当然也是理想状态下的分析, ...
虎哥 发表于 2013-10-26 00:03
这个传感器真的怪异,不论物体放在盘子上的什么位置,结果相同。
就是梅特勒的磁平衡天平,大体上仍然满 ...

| 时段 | 个数 |
|---|---|
| {{f.startingTime}}点 - {{f.endTime}}点 | {{f.fileCount}} |






































![~GF_FO$UX2PT08)7UX}I]ON.jpg](https://img.kechuang.org:81/r/228966?c=resource)

200字以内,仅用于支线交流,主线讨论请采用回复功能。