Toggle navigation
科创网
登录
注册
电波
论坛
专栏
应用
登录
注册
社区事务
公共事务
:
社区公务
生活聊天
科创广场
自助服务区
:
会员海报
|
跳蚤市场
|
科创基金
技术领域
仪器与装备
:
仪器仪表
|
机械与工具
|
拆机鉴赏
物理高能技术
:
核技术与核仪器
|
电磁炮
|
强激光
|
EMP和强微波
航空航天
:
航空技术
|
航天技术
|
喷气推进
|
火箭燃料
电气工程
:
电气电工
|
高电压技术
电子信息
:
电子技术
|
无线电
计算机科学
:
计算机电子学
|
软件综合
晶体培育
:
晶体养成所
工业技术
:
日用工业
|
化工矿冶
|
电动汽车
理工学科
数理化
:
数学
|
物理
|
化学
宇宙和天文
:
天文与空间科学
地球科学
:
地理与地质
|
大气科学
农林牧渔
:
农业
生物医药
:
医学
|
生物学
非主流科学
人文学科
人类协作博弈
:
管理学
|
经济学
|
军事
|
政治
|
法学
人的精神生活
:
语言文学
|
哲学
|
宗教学
|
艺术学
探索人类社会
:
社会学
|
文化人类学
|
历史与考古
人的本能开发
:
体育与技能
|
巫术与玄学
人类信息传播
:
文献情报博物馆
|
新闻与传播
配套设施
科创动态
社区
空间
专栏
全部
文章
1
...
470
471
472
473
474
475
476
...
18015
路人114514
发表评论
2年6个月前
总之,感谢你们的拍砖,不然我无法去除一些煞笔的想法🙏
sxm
慢慢改进吧,
《万户计划(第一阶段)·立项》
sxm
发表回复
2年6个月前
慢慢改进吧,
路人114514
只是立个项嘛…再说了,还没开始搞呢,是吧😂后期会改参数的👍
《万户计划(第一阶段)·立项》
路人114514
发表评论
2年6个月前
这你也能撅出来😂开个玩笑而已啦
遗忘啊啊
怎么说!
《万户计划(第一阶段)·立项》
路人114514
发表评论
2年6个月前
那还是谢谢您的提醒了,我也会依据你们拍的砖逐步调整参数的无论如何,还是感谢🙏
Antonio
有能力发射5kg的载荷入轨,并在低轨道拍摄一张照片二、本计划第一阶段火箭总重小于等于50kg你要不要看看你在说什么?想要达到这个指标,你需要使用液氟 液氢 锂 三组元推进剂,再把室压提高到100Mpa,才有可能实现还有就是建议您去和阿卡林合作
《万户计划(第一阶段)·立项》
路人114514
发表回复
2年6个月前
阿卡林是先做再立项,我是先立项再做,自然被骂😂
sxm
阿卡林最起码在弄,这个直接就离谱上天了。
《万户计划(第一阶段)·立项》
路人114514
发表回复
2年6个月前
确实能当闲聊话题了😃😂😂
粥粥
估计是主贴太离谱了,这位没细看主贴原文是:二、本计划第一阶段火箭总重小于等于50kg三、本计划第一阶段飞行高度大于30000m但是30km,50kg也有点困难至于入轨,我就不多评价了,KC真出了这种新人,咱们沾光,至于出不了吗……哼哼,其实也不会怎么样,多一个闲聊话题而已
《万户计划(第一阶段)·立项》
blki
发表回复
2年6个月前
一定要大搞特搞
《万户计划(第一阶段)·立项》
路人114514
发表回复
2年6个月前
谢谢你的提醒,在这方面我不懂的地方还是太多了…所以说固体液体的矢量还是得请教一下kc的大佬,😬气氧和液氧间的选择我一直犯迷糊,到底有何区别?(望大佬的解答🙏)固推可以射高30km?望指个路学习学习最后,希望吧,希望这个项目不会像她的名字一样😂
粥粥
先把原文放上来:四、本计划第一阶段火箭结构预想分为三段式,由两级液体推进与一级固体推进构成第一级:液氧-甲烷预计飞行高度:海平面~20000m第二级:气氧-乙醇预计飞行高度:20000m~27000m第三级:APCP预计飞行高度:27000m~30000m进入轨道后,载荷下方加装的离子发动机进行姿态调整,拍摄照片,传输回地球。则本计划第一阶段圆满结束一眼看过去,第二行就开始不解了,我还确实没见过哪...
《万户计划(第一阶段)·立项》
白沫0001
发表回复
2年6个月前
您先自己做个能飞的液机试试吧
《万户计划(第一阶段)·立项》
白沫0001
发表回复
2年6个月前
从殷商计划到白鸟计划,再到您这个…有点逆天
《万户计划(第一阶段)·立项》
路人114514
发表回复
2年6个月前
只是立个项嘛…再说了,还没开始搞呢,是吧😂后期会改参数的👍
sxm
还弄了三级,照你这个能力你干脆登个月得了。还是先看看自己在说什么话,别还没搞就招一身黑,楼主还是开个新号注意言辞吧
《万户计划(第一阶段)·立项》
路人114514
发表回复
2年6个月前
你说得对,你这么一提醒,我发现确实有些离谱了😂(毕竟初入,就不要在意我的白痴预计了😂)
Antonio
有能力发射5kg的载荷入轨,并在低轨道拍摄一张照片二、本计划第一阶段火箭总重小于等于50kg你要不要看看你在说什么?想要达到这个指标,你需要使用液氟 液氢 锂 三组元推进剂,再把室压提高到100Mpa,才有可能实现还有就是建议您去和阿卡林合作
《万户计划(第一阶段)·立项》
sxm
发表回复
2年6个月前
还弄了三级,照你这个能力你干脆登个月得了。还是先看看自己在说什么话,别还没搞就招一身黑,楼主还是开个新号注意言辞吧
《万户计划(第一阶段)·立项》
m24h
发表评论
2年6个月前
我也发现了 来不及了
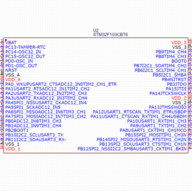
m24h
昨晚上把电路图和PCB都设计好了 用的是嘉立创的EDA 不得不说 因为太多库元件的加成 感觉比KiCAD还快多了 除了AIR001的资料它没有需要自己加 (但是它居然自动给我匹配了正确的TSSOP20封装 非常奇怪 就因为20个引脚么) 确实省了好多麻烦 而且领到了券 下了单 免费5张 这也是我不愿自己做板的原因 因为有可能一用就要3-4张其实大概也就是验证 不会取代我的旧系统 所以做成42电机...
《闭环步进电机驱动》
遗忘啊啊
发表回复
2年6个月前
怎么说!
Ckarlon
建议立刻复活殷商计划 此后科创三足鼎立
《万户计划(第一阶段)·立项》
xljxlj
发表评论
2年6个月前
铺铜的发散线宽最好设置成0(自动),这热焊盘连接线看着有点细
m24h
昨晚上把电路图和PCB都设计好了 用的是嘉立创的EDA 不得不说 因为太多库元件的加成 感觉比KiCAD还快多了 除了AIR001的资料它没有需要自己加 (但是它居然自动给我匹配了正确的TSSOP20封装 非常奇怪 就因为20个引脚么) 确实省了好多麻烦 而且领到了券 下了单 免费5张 这也是我不愿自己做板的原因 因为有可能一用就要3-4张其实大概也就是验证 不会取代我的旧系统 所以做成42电机...
《闭环步进电机驱动》
遗忘啊啊
发表回复
2年6个月前
上一个也是这么说的2年了没发过帖
《万户计划(第一阶段)·立项》
Antonio
发表评论
2年6个月前
美帝的德尔塔IV型重型火箭助推器和芯级烧液氢,上面级烧HTPB
粥粥
先把原文放上来:四、本计划第一阶段火箭结构预想分为三段式,由两级液体推进与一级固体推进构成第一级:液氧-甲烷预计飞行高度:海平面~20000m第二级:气氧-乙醇预计飞行高度:20000m~27000m第三级:APCP预计飞行高度:27000m~30000m进入轨道后,载荷下方加装的离子发动机进行姿态调整,拍摄照片,传输回地球。则本计划第一阶段圆满结束一眼看过去,第二行就开始不解了,我还确实没见过哪...
《万户计划(第一阶段)·立项》
Ckarlon
发表评论
2年6个月前
lz得有民航方面的背景 能让他在三万英尺的客机上发射才能让这个帖成真
粥粥
估计是主贴太离谱了,这位没细看主贴原文是:二、本计划第一阶段火箭总重小于等于50kg三、本计划第一阶段飞行高度大于30000m但是30km,50kg也有点困难至于入轨,我就不多评价了,KC真出了这种新人,咱们沾光,至于出不了吗……哼哼,其实也不会怎么样,多一个闲聊话题而已
《万户计划(第一阶段)·立项》
粥粥
发表回复
2年6个月前
先把原文放上来:四、本计划第一阶段火箭结构预想分为三段式,由两级液体推进与一级固体推进构成第一级:液氧-甲烷预计飞行高度:海平面~20000m第二级:气氧-乙醇预计飞行高度:20000m~27000m第三级:APCP预计飞行高度:27000m~30000m进入轨道后,载荷下方加装的离子发动机进行姿态调整,拍摄照片,传输回地球。则本计划第一阶段圆满结束一眼看过去,第二行就开始不解了,我还确实没见过哪...
《万户计划(第一阶段)·立项》
Ckarlon
发表评论
2年6个月前
万户计划来了
银鞍照白马
咋时不时有个大计划,殷商计划还历历在目希望lz真做点什么出来😂(没有诋毁的意思,只是这种计划看到过太多太监了的了)
《白鸟计划(持续更新中)最近更新至2023年11月12日》
粥粥
发表回复
2年6个月前
估计是主贴太离谱了,这位没细看主贴原文是:二、本计划第一阶段火箭总重小于等于50kg三、本计划第一阶段飞行高度大于30000m但是30km,50kg也有点困难至于入轨,我就不多评价了,KC真出了这种新人,咱们沾光,至于出不了吗……哼哼,其实也不会怎么样,多一个闲聊话题而已
Antonio
有能力发射5kg的载荷入轨,并在低轨道拍摄一张照片二、本计划第一阶段火箭总重小于等于50kg你要不要看看你在说什么?想要达到这个指标,你需要使用液氟 液氢 锂 三组元推进剂,再把室压提高到100Mpa,才有可能实现还有就是建议您去和阿卡林合作
《万户计划(第一阶段)·立项》
Ckarlon
发表回复
2年6个月前
建议立刻复活殷商计划 此后科创三足鼎立
Antonio
有能力发射5kg的载荷入轨,并在低轨道拍摄一张照片二、本计划第一阶段火箭总重小于等于50kg你要不要看看你在说什么?想要达到这个指标,你需要使用液氟 液氢 锂 三组元推进剂,再把室压提高到100Mpa,才有可能实现还有就是建议您去和阿卡林合作
《万户计划(第一阶段)·立项》
sxm
发表回复
2年6个月前
阿卡林最起码在弄,这个直接就离谱上天了。
Antonio
有能力发射5kg的载荷入轨,并在低轨道拍摄一张照片二、本计划第一阶段火箭总重小于等于50kg你要不要看看你在说什么?想要达到这个指标,你需要使用液氟 液氢 锂 三组元推进剂,再把室压提高到100Mpa,才有可能实现还有就是建议您去和阿卡林合作
《万户计划(第一阶段)·立项》
sxm
发表回复
2年6个月前
现在真的是一个比一个离谱啊,我太兴奋了兄弟们,哈哈哈哈哈哈哈
《万户计划(第一阶段)·立项》
粥粥
发表回复
2年6个月前
???不至于吧LZ有点太极端了,要不先看看自己在说什么来真的?!
《万户计划(第一阶段)·立项》
Gdeestan
发表回复
2年6个月前
似乎火箭爱好者中更常见不切实际者?本计划核心目的:以廉价成本、可量产的微型火箭,让太空不再遥远 不太明白LZ的目的,搞这么大的努力就为了更方便看一场太空的烟花? 我认为经济和可靠的地空运载工具更有现实意义。如果LZ也这么认为,我想尽早抛弃幻想,多学些理论知识而后投身航天事业会更有用处。
《万户计划(第一阶段)·立项》
m24h
发表评论
2年6个月前
应该是可以的
量子隧道
等板子的时候不妨先做个实验,用步进驱动器开环驱动步进电机走200*2^N步,每一步从磁编码器读出角度,和驱动给出的预期角度做个差,画个图表。借此了解一下磁编码器的误差,以及可能的矫正公式。或许可以把这个实验做进你的软件的启动自检步骤里。
《闭环步进电机驱动》
鲁健明
发表回复
2年6个月前
想法很好,但你确定50kg够吗?飞控是个大问题,还有你保证30千克的燃料够吗?光一个氮气瓶就10千克左右。最好还是给50㎏加个0吧。
《万户计划(第一阶段)·立项》
Antonio
发表回复
2年6个月前
有能力发射5kg的载荷入轨,并在低轨道拍摄一张照片二、本计划第一阶段火箭总重小于等于50kg你要不要看看你在说什么?想要达到这个指标,你需要使用液氟 液氢 锂 三组元推进剂,再把室压提高到100Mpa,才有可能实现还有就是建议您去和阿卡林合作
《万户计划(第一阶段)·立项》
量子隧道
发表回复
2年6个月前
等板子的时候不妨先做个实验,用步进驱动器开环驱动步进电机走200*2^N步,每一步从磁编码器读出角度,和驱动给出的预期角度做个差,画个图表。借此了解一下磁编码器的误差,以及可能的矫正公式。或许可以把这个实验做进你的软件的启动自检步骤里。
《闭环步进电机驱动》
虎哥
发表回复
2年6个月前
三水哥哥又憋出大招来了。“无无功供弹机”的主要问题是启停过程不锐利,当需要打单发、确定数量的连发时就存在相当大的问题,二连发射速偏低。解决办法设想下列几种之一:1、通过高压启动提高启动转矩,同时采用减速机,或者使用大扭矩的交流无刷电机,使速度在半个供弹周期内达峰,并能在半个供弹周期内刹停。2、推杆要有弹簧缓冲结构,当卡弹时避免堵转损坏机械结构。3、推杆行程略短于弹丸长度,同时炮膛内有锁止机构,当上...
《电磁炮的供弹机构——用旋转电机驱动》
m24h
发表回复
2年6个月前
昨晚上把电路图和PCB都设计好了 用的是嘉立创的EDA 不得不说 因为太多库元件的加成 感觉比KiCAD还快多了 除了AIR001的资料它没有需要自己加 (但是它居然自动给我匹配了正确的TSSOP20封装 非常奇怪 就因为20个引脚么) 确实省了好多麻烦 而且领到了券 下了单 免费5张 这也是我不愿自己做板的原因 因为有可能一用就要3-4张其实大概也就是验证 不会取代我的旧系统 所以做成42电机...
《闭环步进电机驱动》
三水合番
发表文章
2年6个月前
电磁炮的供弹机构——用旋转电机驱动
关于连发电磁炮的供弹机构,在业余爱好者圈子里,目前主要的做法分类两大类:1. 电磁铁。包括推拉电磁铁,以及电磁直供。2. 正反转的旋转电机,加“旋转-直线”转换机构。比如电机+丝杆,齿轮齿条,舵机。这两大类做法,除了电磁直供以外,想要做高射速,比如1000rpm以上,都比较困难。其共性的问题在于:“无功功率”过大。“无功功率”指用来加速(或减速)供弹机构本身的功率,相对的,“有功功率”则指用来加速...
路人114514
发表文章
2年6个月前
万户计划(第一阶段)·立项
本计划核心目的:以廉价成本、可量产的微型火箭,让太空不再遥远一、本计划第一阶段目的有能力发射5kg的载荷入轨,并在低轨道拍摄一张照片二、本计划第一阶段火箭总重小于等于50kg三、本计划第一阶段飞行高度大于30000m四、本计划第一阶段火箭结构预想分为三段式,由两级液体推进与一级固体推进构成第一级:液氧-甲烷预计飞行高度:海平面~20000m第二级:气氧-乙醇预计飞行高度:20000m~27000m...
路人114514
发表评论
2年6个月前
可以和我们的万户计划合并吗😂
岩倉凛IwakuraRin
由于我被翻出大量中二史 还顺带被挂上“殷商计划总工”称号(虽然是我自嘲黑历史而给自己挂的) 所以我特么就干脆假戏真做呗 自2023.9.24开始 我来负责继承殷商计划 并改名为“后殷商计划” 第一步是送一个100N的小液发上去(目前发动机正在加工
《「殷商计划」》
托卡马克
发表评论
2年6个月前
是的
暗影魔王
是3525推挽给非晶磁环吗?
《TK14 手提式连发电磁炮(8*22mm 97mps 16%)》
slof
发表回复
2年6个月前
大约10-20年前机器,它后续机型symbia仍然是内置59个pmt结构,现在业内主力机型,包括GPS三家都是如此,技术和结构差别不大。
5free
“PMT只相当于一个像素,整个探测器只有59个像素,每个像素尺寸接近5cm直径,但实际上他可以有大约3-5mm的分辨率”这是什么年代的机器?如果是现代,探测器会不会被平板接收器 FPD 取代?
《拆解医用ECT,伽马相机》
LoserWong
发表回复
2年6个月前
666
《TK14 手提式连发电磁炮(8*22mm 97mps 16%)》
虎哥
发表回复
2年6个月前
我用有限的知识推理一番,得到如下猜测:1、药物诱发的γ能量高,需要较厚的闪烁体,否则大部分能量/大概率不作用。2、注射的核素本来活度就不高,否则就把人照死了。因此,人体内产生的γ辐射剂量率很低,需要极高的探测灵敏度,最好是一个(方向正确的)光子都别漏掉。3、由于2,探测器的速度足以区分孤立事件,可以算出高分辨率,没有必要靠像素密度来堆。4、平板探测器本质上是直接看图像亮度,跟数码相机的CCD是类似...
5free
“PMT只相当于一个像素,整个探测器只有59个像素,每个像素尺寸接近5cm直径,但实际上他可以有大约3-5mm的分辨率”这是什么年代的机器?如果是现代,探测器会不会被平板接收器 FPD 取代?
《拆解医用ECT,伽马相机》
1
...
470
471
472
473
474
475
476
...
18015
跳转到
页
确定
网站应用
科创基金
计算工具
单收系统
考试系统
公告通知
我们的科创
会员手册(新人必读)
论坛提问指南(规范性指南)
产生一流科技社区的必要条件
科创(成都局)招聘专职工作人员启事
科创相关各微信群、Q群
精选文章
【有机合成小品】环庚三烯正离子氟硼酸盐的制备以及环丙烯正离子盐的展示
化学
H3PO49
3个月14天前
简单多卤阴离子难溶盐的水相制备实验及应用科普
化学
脱碳乙酸
29天2时前
「全网首发?」尝试点亮obis core 488ls
强激光
WEIZILI
2个月13天前
【教程】如何用Maxwell仿真和自动优化电磁炮(上)
电磁炮
2SC1970
5个月23天前
2,4,6-三苯基吡喃盐的制备实验操作,机理讲解和杂质分析——实验操作部分
化学
脱碳乙酸
3个月6天前
国产谐波雷达(非线性结点探测器)TZD95C的拆解参观
无线电
虎哥
4年3个月前
【高清无码大图】液氧石蜡再生冷却初步测试。
喷气推进
猎鹰
13年5个月前
观赏型方解石,冰洲石
地理与地质
power_rdx
17年10个月前
新手初次做特斯拉线圈(正在进行中。。)各位请多指教
高电压技术
yangliang897
16年9个月前
推荐文章
关于如何更好更合规地发展科技爱好
科学技术学
月下孤狼
2天6时前
关于量产型小型固体火箭的制作—喷口篇
喷气推进
liaonan
4年1个月前
对于药物滥用的一些测试与感想
医学
净释十方
3天10时前
锥形磨口凡八问
机械与工具
粥粥
6天15时前
一种新型高氯酸盐类炸药的合成和测试 暨对原文数据的质疑
化学
dracula1429
8年1个月前
如何不被自己毒死——从头定制简易通风橱
仪器仪表
绛蓝铜氨
3天7时前
二级探空火箭的制作&发射失败问题分析(科创基金项目)
航天技术
暮羽要摸鱼
1年11个月前
关于网站受攻击情况的一些说明和疑问
软件综合
虎哥
4个月22天前
半导体制冷片的制冷效率能达到3000%(在零温差下)
电子技术
三水合番
1个月3天前
关于浓盐酸的制备
化工矿冶
lyf凌倚风
1个月20天前
新同学
×
{{mode === 'selector'? '选择专业': '移动文章'}}
加载专业列表中...
已选择的专业:
无
{{forum.displayName}}
:{{forum.selectedThreadType.name}}
不分类
{{t.name}}
移动方式:
添加专业
删除原有专业
只显示允许匿名发表的专业:
是
否
{{c.name}}
{{forum.displayName}}
{{f.displayName}}
多维分类:
通知用户
标记为违规